Gazebo is an open-source 3D robotics simulator. This guide we will outline the steps for installing and running Gazebo.
The following instructions are for running Gazebo on Windows only.
Prerequisites
Ubuntu
Follow the instructions to setup Ubuntu with WSL here under 'docker'.
Gazebo 9
Install Gazebo (version 9 last tested) using Ubuntu.
Install Gazebo dev libaries.
sudo apt-get install libgazebo9-dev
VcXsrv Windows X Server
VcXsrv allows you to run a graphical GUI from Ubuntu WSL.
Download and install VcXsrv here.
Running NUbots simulation
Clone this repo.
git clone https://github.com/NUbots/Gazebo.gitInstall the plugin.
cd gazebosudo bash ./install_plugin.shEnsure your firewall is disabled for Ubuntu before continuing.Setup WSL to connect with VcXsrv server.
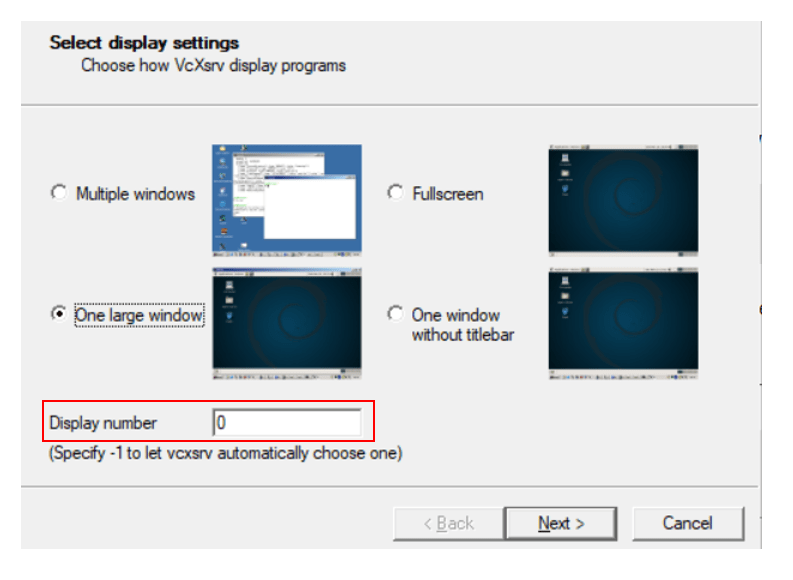
export GAZEBO_IP=127.0.0.1export DISPLAY=$(cat /etc/resolv.conf | grep nameserver | awk '{print $2}'):0export LIBGL_ALWAYS_INDIRECT=0Run XLaunch (VcXsrv server).
Change the Display number to 0.
Display number Leave all settings default except for 'Native opengl' and 'Disable access control'
Extra settings Run the plugin.
sudo bash ./run_plugin.sh

You are now ready to simulate!

